Stepper motor Hybrid type
This is the most common type of stepper motor drives used in modern high-tech equipment. They have a small angular step ≈ 1.8 0 , and when the electronic splitting step can be achieved relatively high positioning accuracy of the shaft. An example is the series engines DR firm Yokogawa Electric Corp . produced by torques from 5 to 500 Nm Engines Immersed good dynamic qualities calculated to low speed - 240 rev / min, and have a high power density.
Currently widely kostruktivnye two circuits. The scheme shown in Figure 1 consists of a stator 1 and a rotor winding comprising two gear 3 are shifted by a quarter core tooth pitch and an annular magnet therebetween. In the literature (see Kenio T. Stepper motors and microprocessor control systems), such a structure is called a hybrid. Figure 2 shows another construction of a rotor which has a solid core timing, and contains a laminated stator core 1, the winding 4 and the permanent magnets 3. In the electromagnetic sense, both designs are identical, but structurally the circuit in Figure 2 has large dimensions stator, with a simpler design of the rotor.
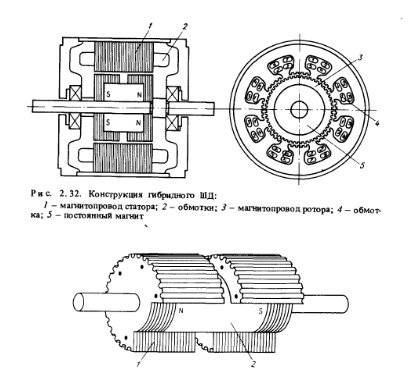
Fig.1
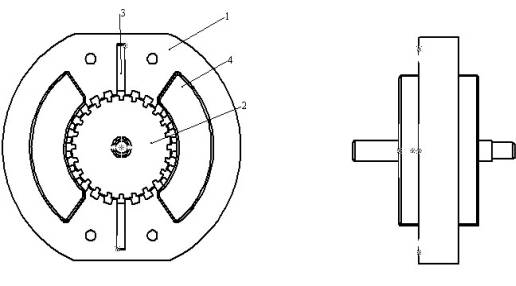
Figure 2
We offer joint development and production of this type of engine and equipment based on them. For more information and their offerings, go to contacts .
Return to [ page design ] [ home page ]